Ninenox Developer
Menu
Blog
About
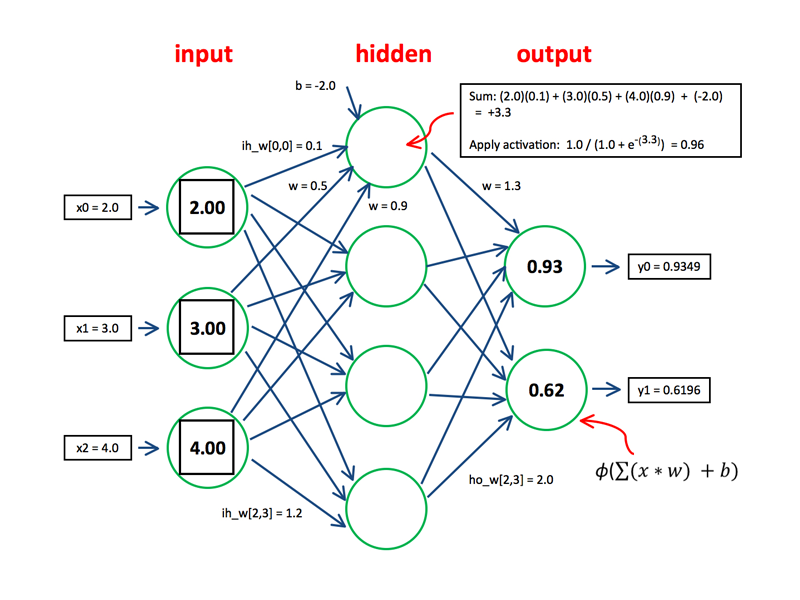
บทสรุป Neural Network and Deep Learning
บทสรุป Neural Network and Deep Learning
{kind=link}